- Recently added/modified rules are denoted with red color.
General Rules
Each team must have an academic advisor from their institutes.
Each educational institution may submit at most two (2) team entries. Elimination will take place right after the final report submission regarding the final report score and proof-of-flight video status. It should be noted that the technical committee has the right to increase the number of accepted teams from a single university in case of 3 or more outstanding applications.
At least 3/4 of the team members must consist of undergraduate students.
Official language of the competition is English. Thus, all the submissions (proposal and final design report) should be in English.
The aircraft must takeoff and land vertically.
Minimum flight altitude should not be less than 20 m AGL. This limit only applies to forward flight phase. That is, the aircraft can descend below 20 m during vertical flight phases (e.g. payload droq, QR code recognition). The technical committee has the right to increase and/or decrease this safety limit depending on the competing aircrafts' flight performance.
The aircraft may be solely propeller lifted and propeller driven. Aircraft must lift-off vertically, transit to forward flight, and use aerodynamic surfaces to generate lift with sufficient wing area. During flight, teams must demonstrate that the lift is mainly due to wings, and total propulsive force acts dominantly along the longitudinal axis of the aircraft. That means, the aircraft may not be in a multi-rotor drone or a helicopter configuration.
No form of externally assisted take-off (hand launched, catapults, etc.) is allowed. All the necessary energy for take-off, mission flight, and landing must come from the on-board propulsion battery pack(s).
Once a mission has a successful scoring flight it may be repeated to try to improve the score.
Aircraft must be designed to be capable of performing all required missions.
All missions must be flown autonomously.
Before the flight, each aircraft must have been registered through the Turkish Civil Aviation Authority database via website.
Propulsion system of the aircraft must be through brushless electric motors, electronic speed controllers (ESCs), and batteries.
Ready-to-fly kits are strictly forbidden. Teams having ready-to-fly kits will be disqualified without any excuse.
The takeoff weight of the aerial vehicle (including the payload) must be less than 20 kg. The vehicle will be weighed before takeoff.
The aircraft must takeoff and land within the designated takeoff and landing area.
Each team’s flight order will be determined from their report score. The highest report score goes first during the competition.
Each team may takeoff several times for each task. If more than one successful flight is carried out, the one with the highest score will be considered.
The pilot must be a registered RPV (remotely piloted vehicle) pilot of the Turkish Civil Aviation Authority. Teams may use a pilot who is not affiliated by their university, if desired. Organizing committee will provide qualified pilots at the contest on an as-available basis to assist teams who are unable to have their pilot attend. Teams should inform the organizing committee beforehand if such a pilot is required.
The aircraft may be damaged during a flight. If the aircraft is declared "repairable", the flight will be considered as successful. “Repairable" aircraft are those which can be repaired and operated within 5 minutes. The repair will take place in the repair area.
After each successful flight, teams must submit their flight logs to the referee at the technical inspection and preparation area.
Missions must be flown in order. A new mission cannot be flown until the team has obtained a successful score for the preceding mission.
Two or more universities may form a single team to submit a single entry.
Aircraft must complete a successful landing at the end of each mission for the mission to receive a score.
The aircraft must takeoff in all missions within 10 minutes after the start is given by the referee.
The pilot cannot leave the takeoff station during the flight.
During the flight, aircraft must stay in the safety zone. Otherwise, the flight will be declared as invalid, and the team will lose the flight opportunity.
Flight pattern will be a rounded rectangle with dimensions of 300 x 100 meters.
Scoring measurement units are kg and seconds.
Each team will be given up to 90,000.00 TRY to manufacture their aircraft. Their expenses up to the mentioned amount will be reimbursed in return for valid invoices (Invoice Information: ODTÜ Geliştirme Vakfı, Üniversiteler Mahallesi, İhsan Dogramacı Bulvarı, ODTÜ TEKNOKENT, ETKİM Binası No: 31/8, Çankaya, Ankara. Doğanbey V.D.: 6340009161). For this purpose, the teams must attend the competition and give their invoices to the organizing committee during the competition.
Travel expenses of those teams attending to the competition will also be covered separately. Sufficient accommodation will be reserved for the teams as well.
Each team is expected to adopt the aircraft to all missions. Teams may make modular changes in aircraft structural and/or propulsion systems (that includes the wing, tail, and propellers), except the battery size. Battery capacities should be identical in all missions. It can be charged or replaced with an unused one as long as it has the same energy capacity. Teams should demonstrate that these changes can be conducted within 15 minutes.
Mission 1 - Ferry Flight
The objective of mission 1 is to complete the maximum number of lapses within a 5 minutes flight duration.
5 minute flight duration starts when the aircraft passes over “Checkpoint A”.
In this mission, no payload will be carried by the aircraft.
The aircraft is expected to land to a designated landing area after the mission flight. The designated landing area will be marked by a 3m x 3m QR code and landing precision will be rated by the variable, $\large K_{prec}$, in the flight score. QR code is as given below. Vectorial format of the QR code can also be downloaded from here
A lap is completed when the full flight pattern (see above figure) is flown and the aircraft passes over “Checkpoint A”.
Lap counts will be represented with integers. Thus, half laps will not be counted.
Each lap will be counted if the green flag is raised by the referee. Returns before the designated turn around point (checkpoints) will not be counted.
Mission score will be computed according to the following relation:
where $\large N_{lap}$ is the number of laps completed, $\large N_{lap,max}$ is the maximum number of laps completed amongst all the teams. $\large K_{prec}$ is the precision landing parameter such that $\large K_{prec}=1$ if all the aircraft contact points to the ground are within the 3x3 m2 QR code area, otherwise $\large K_{prec}=0$. $OEW_1$ is the operating empty weight measured right at the beginning of the mission flight (in kg).
Mission 2 - Pirouette Mission Task Element
In this mission, the aircraft will perform Pirouette maneuever. Specifically, the aircraft will takeoff to a safe altitude of 20 m. When the safe altitude is reached, the aircraft starts perfect circular motion in VTOL-QUAD mode with the heading being continuously directed to the center of circle. The radius of the circle is 15 m. See the following image for a representetive motion.
Any deviation from the fixed circle radius will be penalized (shown by $\large d$ in the above Figure).
If the aircraft heading does not point the center of circle, it will be penalized. The penalized quantity will be the maximum absolute difference between heading and ideal bearing with respect to center of the circle.
Any change in the AGL altitude will be penalized, too.
Teams will get higher points for completing the Pirouette maneuever faster. Time for the maneuvering flight is the time elapsed to complete the circular motion. Vertical takeoff and landing phases are excluded from the maneuvering flight time.
Mission score will be computed according to the following relation:
where $\large |\Delta h|_{max}$ is the maximum absolute difference between aircraft AGL altitude and the ideal AGL of 20 m, $\large |\Delta R|_{max}$ is the maximum absolute difference between distance to center of circle and the ideal radius of 15 m, $\large |\Delta \psi|_{max}$ is the maximum absolute difference between aircraft heading and aircraft bearing with respect to the circle center (in degrees), and $\large \Delta t$ is the time elapsed to complete the pirouette maneuver (in seconds).
Mission 3 - Fixed-wing Loiter Performance
In this mission, the aircraft will carry the fixed payload of 0.5 kg (a bottle of water) as a slung load attached to the end of a 1-meter-long tope. The aircraft will enter the inspection area with the payload uninstalled.
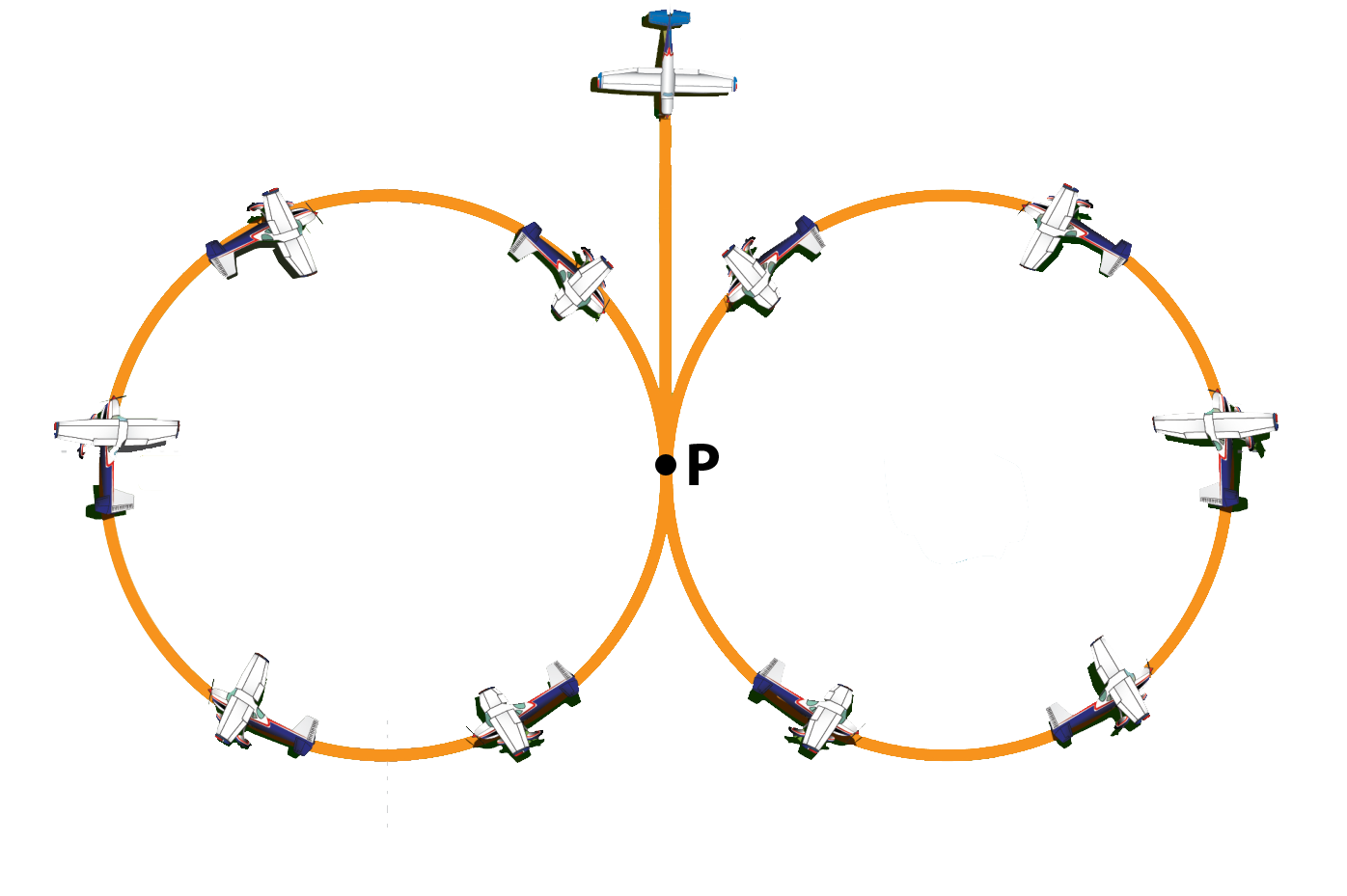
The flight pattern will be a Figure-8 maneuver on the horizontal plane (see figure below). The radius of the circle will be determined by the teams. Coordinates of the point $P$ (shown in the image below) will be determined by the organizing committee.
The aircraft should complete 3 Figure-8 maneuvers with the payload.
In this mission, the amount of change in the wingspan will be counted in the scoring. Therefore, it is expected from teams to design the wing as reconfigurable.
After 3 complete Figure-8 maneuevers, the payload will be released to the target area.
Dropping sensitivity factor $\large K_{drop}$ will be determined according to the first contact point on the target.
Mission score will be computed according to the following relation:
where $b_1$ and $b_3$ are the wingspans of aircraft flown in mission 1 and mission 3, respectively. $R_{min}$ is the minimum averaged turn radius flown amongst all the teams, $R$ is the average turn radius flown in the mission, $RMS_{min}$ is the minimum achieved root mean square error of the distance on the horizontal plane (amongs all the teams), which is obtained by the difference between actual flight path and the ideal figure-8 pattern. $RMS$ is root mean square error of the horizontal distance obtained in the flight. $OEW_3$ is the operating empty weight measured right at the beginning of the mission flight #3. $K_{drop}$ is the dropping sensitivity factor.
Target at which the payload will be dropped is given as ($R_1=0.3$ m, $R_2=0.6$ m, $R_3=1.0$ m, $R_4=1.5$ m, $R_5=2.5$ m). Dropping sensitivity factor $K_{drop}=5$ if the payload is dropped inside the inner-most circle with radius $R_1$, and decreases linearly up to $K_{drop}=1$ for the circle with radius of $R_5$.
Final Score
Report
In the final design report, teams must provide the estimated operating empty weight!